Usage of assembly component transformation in SOLIDWORKS API
SOLIDWORKS components are instances of models (parts or assemblies) in the another parent assembly. Component's position in its space is driven by its transformation (regardless if the component is constrained by mates or moved in the space by free drag-n-drop operation). Transformation consists of 3 components: translation, rotation and scale.
To get the transformation of the component use the IComponent2::Transform2 SOLIDWORKS API property. The transform in this case represents the relation of the component origin coordinate systems to the root assembly origin coordinate system. It is not required to multiple the transform of sub-assemblies for its children components to get the total transformation of these components relative to root assembly.
Translation Transformation
In the example below the component is moved in space Along X, Y and Z coordinates. The following example will calculate the new positions of the component's origin:
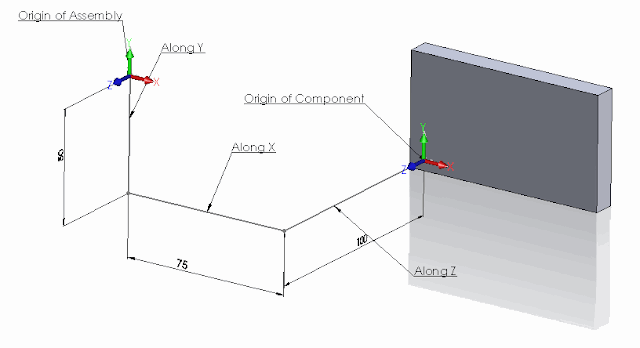
Dim swApp As SldWorks.SldWorks Dim swMathUtils As SldWorks.MathUtility Dim swModel As SldWorks.ModelDoc2 Dim swSelMgr As SldWorks.SelectionMgr Dim swComp As SldWorks.Component2 Sub main() Set swApp = Application.SldWorks Set swMathUtils = swApp.GetMathUtility Set swModel = swApp.ActiveDoc Set swSelMgr = swModel.SelectionManager Set swComp = swSelMgr.GetSelectedObject6(1, -1) Dim swTransform As SldWorks.MathTransform Set swTransform = swComp.Transform2 Dim dOrigPt(2) As Double dOrigPt(0) = 0: dOrigPt(1) = 0: dOrigPt(2) = 0 Dim swMathPt As SldWorks.MathPoint Set swMathPt = swMathUtils.CreatePoint(dOrigPt) Set swMathPt = swMathPt.MultiplyTransform(swTransform) Dim vCompOriginPt As Variant vCompOriginPt = swMathPt.ArrayData Debug.Print "Along X: " & vCompOriginPt(0) * 1000 & "mm; " & "Along Y: " & vCompOriginPt(1) * 1000 & "mm; " & "Along Z: " & vCompOriginPt(2) * 1000 & "mm" End Sub
The following line will be output to the Watch window as the result of running the macro on this sample model:
Along X: 75mm; Along Y: -50mm; Along Z: -100mm
Rotation Transformation
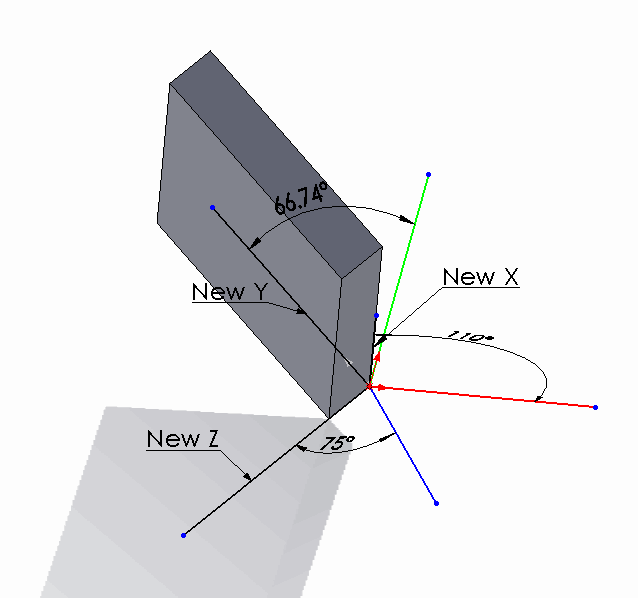
Now let's rotate the component and try to find the rotation angles. This component is rotated in all directions. Red line below - is the X axis of the assembly, Green line - Y axis, Blue line - Z axis. New X, New Y and New Z - are orientation of the corresponding axes in the component and dimensions indicate the angles between those axes.
Const PI As Double = 3.14159265359 Dim swApp As SldWorks.SldWorks Dim swMathUtils As SldWorks.MathUtility Dim swModel As SldWorks.ModelDoc2 Dim swSelMgr As SldWorks.SelectionMgr Dim swComp As SldWorks.Component2 Sub main() Set swApp = Application.SldWorks Set swMathUtils = swApp.GetMathUtility Set swModel = swApp.ActiveDoc Set swSelMgr = swModel.SelectionManager Set swComp = swSelMgr.GetSelectedObject6(1, -1) Dim swTransform As SldWorks.MathTransform Set swTransform = swComp.Transform2 Debug.Print "Angle between X axes: " & Round(GetAngle(1, 0, 0, swTransform) * 180 / PI, 2) & " deg" Debug.Print "Angle between Y axes: " & Round(GetAngle(0, 1, 0, swTransform) * 180 / PI, 2) & " deg" Debug.Print "Angle between Z axes: " & Round(GetAngle(0, 0, 1, swTransform) * 180 / PI, 2) & " deg" End Sub Function GetAngle(x As Double, y As Double, z As Double, transform As SldWorks.MathTransform) As Variant Dim dVect(2) As Double dVect(0) = x: dVect(1) = y: dVect(2) = z Dim swMathVecOrig As SldWorks.MathVector Dim swMathVecTrans As SldWorks.MathVector Set swMathVecOrig = swMathUtils.CreateVector(dVect) Set swMathVecTrans = swMathVecOrig.MultiplyTransform(transform) 'cos a= a*b/(|a|*|b|) GetAngle = ACos(swMathVecOrig.Dot(swMathVecTrans) / (swMathVecOrig.GetLength() * swMathVecTrans.GetLength())) End Function Function ACos(val As Double) As Double If val = 1 Then ACos = 0 ElseIf val = -1 Then ACos = 4 * Atn(1) Else ACos = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1) End If End Function
Running the code above will output the following results for this sample model:
Angle between X axes: 110 deg
Angle between Y axes: 66.74 deg
Angle between Z axes: 75 deg
Preserving Transformation State In Configurations
By default transformation state of the floating component in the configuration will be overridden by another configuration state in case of assembly modifications, such as new component addition, mate changes etc. This is different from the manual behavior when floating component's position will not be changed if another configuration modified.
To demonstrate the issue consider the following scenario:
- Download the sample assembly which has a single component
- There are 2 configurations in the assembly
- Configuration A has the component position fully defined by mates
- Configuration B has a floating component without any mates in the random position
- Run the following macro. Macro will align the corner of the component with the origin of the assembly in the Configuration B
- Macro will stop at several points. Read the comment indicating the state
- On the last step the transformation assigned to the floating component was overridden by the transformation in the Configuration A driven by mates.
#If VBA7 Then Private Declare PtrSafe Function SendMessage Lib "User32" Alias "SendMessageA" (ByVal hWnd As Long, ByVal wMsg As Long, ByVal wParam As Long, lParam As Any) As Long #Else Private Declare Function SendMessage Lib "User32" Alias "SendMessageA" (ByVal hWnd As Long, ByVal wMsg As Long, ByVal wParam As Long, lParam As Any) As Long #End If Dim swApp As SldWorks.SldWorks Sub main() Set swApp = Application.SldWorks Dim swModel As SldWorks.ModelDoc2 Set swModel = swApp.ActiveDoc swModel.ShowConfiguration2 "B" Dim swRootComp As SldWorks.Component2 Set swRootComp = swModel.ConfigurationManager.ActiveConfiguration.GetRootComponent3(False) Dim swComp As SldWorks.Component2 Set swComp = swRootComp.GetChildren()(0) Dim swTransform As SldWorks.MathTransform Dim dMatrix(15) As Double dMatrix(0) = 1: dMatrix(1) = 0: dMatrix(2) = 0: dMatrix(3) = 0 dMatrix(4) = 1: dMatrix(5) = 0: dMatrix(6) = 0: dMatrix(7) = 0 dMatrix(8) = 1: dMatrix(9) = -0.03: dMatrix(10) = -0.05: dMatrix(11) = -0.01 dMatrix(12) = 1: dMatrix(13) = 0: dMatrix(14) = 0: dMatrix(15) = 0 Dim swMathUtils As SldWorks.MathUtility Set swMathUtils = swApp.GetMathUtility Set swTransform = swMathUtils.CreateTransform(dMatrix) swComp.Transform = swTransform swModel.EditRebuild3 Stop 'Component is aligned 'FixComponentInThisConfiguration swComp swModel.ShowConfiguration2 "A" Dim swAssy As SldWorks.AssemblyDoc Set swAssy = swModel swAssy.AddComponent5 swComp.GetPathName(), 0, 0, False, "", 0.2, 0.2, 0.2 swModel.EditRebuild3 Stop 'New component is added into configuration A swModel.ShowConfiguration2 "B" Stop 'Component in configuraiton B lost its position End Sub Sub FixComponentInThisConfiguration(comp As SldWorks.Component2) If False <> comp.Select4(False, Nothing, False) Then Const WM_COMMAND As Long = &H111 Const CMD_FixCompInThisConf As Long = 51605 SendMessage swApp.Frame().GetHWnd(), WM_COMMAND, CMD_FixCompInThisConf, 0 Else Err.Raise vbError, "", "Failed to select component" End If End Sub
In order to preserve the transformation it is required to fix the component in the Configuration B.
- Uncomment the following line
- Close the assembly without saving and reopen it again
'FixComponentInThisConfiguration swComp
to
FixComponentInThisConfiguration swComp
- Run macro again. Now the transformation is preserved